서론
애써 만든 turtle_teleop이 널리 퍼졌으면 좋겠어서 index.ros.org에 등록하고, apt를 통해 설치할 수 있게 만들고 싶습니다. 다음 글을 참고하여 절차를 진행하겠습니다.
Documentation Generation을 S 레포지토리 인덱싱하기
자신만의 ROS 패키지 레포지토릴를 만들었다면, 스택과 패키지를 ROS.org에 등록할 수 있습니다.
1. 패키지를 indexer에 올리면 좋은 점
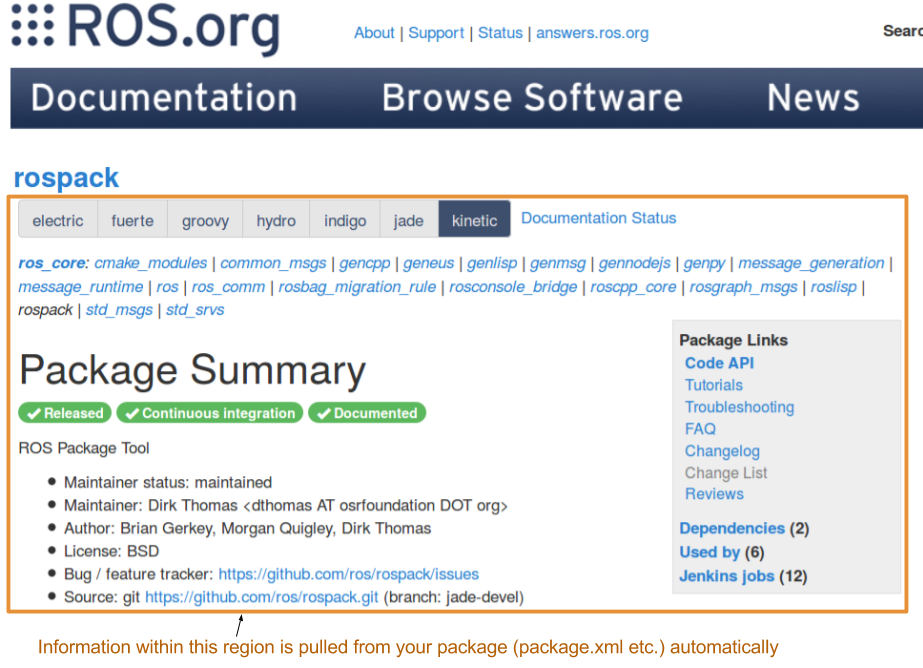
(이 이미지는 여기에서 수정할 수 있습니다.)
- 패키지 위키 페이지는
package.xml로부터 자동으로 정보를 가져옵니다. (위 이미지를 참고) - (매우 좋은) 부수 효과; 가져온 정보는 검색 엔진이 페이지를 수집할 때 도움이 되며, 패키지의 가시성을 높여줍니다.
2. 최초로 패키지를 indexer에 추가할 때
2.1 패키지를 indexer에 추가하는 과정
-
먼저 GitHub에서 다음 레포지토리를 포크합니다. https://github.com/ros/rosdistro

- GitHub 레포지토리를 포크하는 법에 대해 더 알고 싶다면 다음을 참고: https://help.github.com/articles/fork-a-repo
-
복사한 레포지토리를 수정하기 위해 Checkout 합니다.
- git clone git@github.com:my_github_name/rosdistro.git
-
복사한 레포지토리에서 업데이트 하려는 배포판의 디렉토리로 이동합니다.
- cd rosdistro/
-
해당 폴더 내부에서
distribution.yaml파일을 수정하고doc세션과 함께 커스텀 레포지토리 정보를 추가합니다. (레포지토리의 알파벳 순서를 지키면서)- 레포지토리 url은 release 레포지토리가 아닌, upstream 레포지토리를 가리켜야 합니다.
- 경우에 따라서 레포지토리 엔트리에 다른 레포지토리 이름으로 이루어진 의존성 리스트를 추가할 수 있습니다.
-
아래 스크립트를 rosdistro 최상위 폴더에서 실행하여 파일이 rosdistro 포맷 형식을 따르도록 만듭니다. 파일이 변경되므로, 안전을 기한다면 변경사항을 백업해놓으세요.
- rosdistro_reformat file://"$(pwd)"/index.yaml
-
커밋하기 전에 변경 사항을 확인하세요
- git diff distribution.yaml
- git commit -m "Adding my_repo_name to documentation index for distro" distribution.yaml
-
변경 사항을
git push origin master를 이용하여 원격 저장소 레포지토리에 푸시하세요. -
GitHub rosdistro 프로젝트에 당신의 rosinstall 파일을 indexer에 추가해달라는 pull request를 남기세요.

2.2 간단하게 패키지 위키 페이지 생성하기
- 계정이 없다면 wiki.ros.org에서 계정을 생성하고 로그인하세요.
- 만들고 싶은 페이지 이름의 url로 접속하세요.
- e.g. "http://wiki.ros.org/your_package" for "your_package"
- 페이지에 접속하면 페이지가 존재하지 않는다고 표시될 것입니다. 적절한 템플릿을 선택하여 페이지를 생성하세요.
- 패키지의 경우, "PackageTemplate"를 선택합니다.
- 위키는 패키지에 대한 사용법, 튜토리얼, 리뷰를 비롯한 다양한 콘텐츠 문서를 만드는 걸 장려하고 있습니다. 패키지 문서 작성 가이드라인을 참고하세요.
끝입니다! pull request가 받아들여지면, rosinstall 파일에 대한 문서가 생성됩니다.
3. upstream으로부터 pull 하기
github.com/ros/rosdistro에서부터 변경사항을 받아오려면, 다른 원격 저장소를 추가할 필요가 있습니다.
git remote add upstream https://github.com/ros/rosdistro.git이제 다른 사람들이 만들고 ROS가 깃허브에 커밋한 변경사항을 가져옵니다.
git pull upstream깃이 upstream으로부터 정보를 받아오고 자동으로 브랜치를 머지합니다. 이 과정은 로컬 레포와 업스트림의 충돌 사항을 알리지 않습니다. 다음 명령어를 사용할 때 브랜치를 명시해야 합니다.:
git pull upstream master다음 명령어와 같습니다.
git fetch upstream
git merge upstream/master이 두 절차의 과정은 로컬 레포와 업스트림 간 충돌 사항이 있을 경우 이를 표시합니다.
indexer에 패키지가 반영되었는지 확인하기
모든 문서 작업을 추가한 메타/패키지/스택은 젠킨스 서버에 생성됩니다: http://build.ros.org/ (반영까지 시간이 걸릴 수 있습니다)
패키지를 찾으려면 그냥 메타/패키지/스택 이름을 검색창에 입력하기만 하면 됩니다. job 페이지에서 상태, 실패 메시지와 전체 콘솔 출력을 확인할 수 있습니다.
ROS 패키지 레포지토리를 ROS.org에 문서화하기
레포지토리가 인덱싱되었다면, 문서 작업은 재생성되고 실행됩니다.
위에 설명한 것처럼 위키 패이지를 생성하고, 위키에 문서를 추가하기 위해 다음 규칙을 따르세요:
훌륭한 위키 문서화의 예시:
패키지 발표하기
ros.org에 인덱싱되면, 다른 어떤 글로벌 커뮤니티보다 가장 눈에 잘 띕니다. 누군가 Google이나 ROS wiki의 패키지 검색을 통해 찾을 수 있습니다. 그러나 사람들에게 작업물에 대해 알리는 건 항상 중요합니다. (발표가 얼마나 도움이 되는지에 대한 논의를 참고하세요)
이를 위해 discourse.ros.org "`general`" 카테고리에 새로운 포스트를 작성하세요.
이미 릴리즈 된 패키지에 대한 대규모 업데이트가 있다면, 이러한 내용을 발표하는 것 또한 중요합니다.
1. 새로운 패키지 발표를 위한 템플릿
패키지를 발표할 때 무엇을 포함해야 할 지 모르겠다면 다음을 참고하세요:
- 패키지 이름
- 패키지에 대한 짧은 설명 (package.xml을 복사해도 됩니다. package.xml에 설명을 추가하는 걸 잊지 마세요!!)
- wiki.ros.org의 패키지 페이지 링크
- 튜토리얼이 있다면 튜토리얼 링크
- 모든 기여자에 대한 헌사
많은 명확한 예시를 찾아볼 수 있습니다.
결론
release용 빌드하는 방법을 우선 정리했어야 하는데...
'Robotics' 카테고리의 다른 글
| 27일차 - 터틀봇 네트워크 오류와 export (0) | 2020.07.28 |
|---|---|
| 26일차 - ROS 패키지 배포하기_코드편 (0) | 2020.07.26 |
| 24일차 - turtlebot3_teleop_key로 다중 키 입력 받기_2 (0) | 2020.07.25 |
| 23일차 - turtlebot3_teleop_key로 다중 키 입력 받기_1 (0) | 2020.07.25 |
| 22일차 - Turtlebot3 Bringup 코드 분석 (1) | 2020.07.22 |
