Action Demo 패키지 생성
이번에는 action을 이용하는 패키지를 만들어보도록 하겠습니다. goal로써 전달된 값만큼 Fibonacci 수열을 계산하며 계산 과정은 feedback, 최종 결과는 result로 반환하는 데모입니다.
catkin_create_pkg ros_tutorials_action actionlib actionlib_msgs roscpp std_msgs message_generation이번 데모에서는 추가로 actionlib를 사용합니다. actionlib는 긴 시간 동안 요청에 대한 결과가 반환되지 않을 때 timeout을 해줍니다. 서버와 클라이언트 모두 클래스 형태로 제공됩니다.
package.xml 수정
<?xml version="1.0"?>
<package format="2">
<name>ros_tutorials_action</name>
<version>0.0.0</version>
<description>The ros_tutorials_action package</description>
<maintainer email="root@todo.todo">root</maintainer>
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<build_depend>message_generation</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>actionlib</build_export_depend>
<build_export_depend>actionlib_msgs</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
<exec_depend>std_msgs</exec_depend>
<export></export>
</package>CMakeLists.txt 수정
cmake_minimum_required(VERSION 3.0.2)
project(ros_tutorials_action)
find_package(catkin REQUIRED COMPONENTS
roscpp
actionlib
actionlib_msgs
message_generation
std_msgs
)
find_package(Boost REQUIRED COMPONENTS system)
add_action_files(FILES Fibonacci.action)
generate_messages(DEPENDENCIES actionlib_msgs std_msgs)
catkin_package(
LIBRARIES ros_tutorials_action
CATKIN_DEPENDS roscpp actionlib actionlib_msgs std_msgs
DEPENDS Boost
)
include_directories(
${catkin_INCLUDE_DIRS}
${Boost_INCLUDE_DIRS}
)
add_executable(action_server src/action_server.cpp)
add_dependencies(action_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(action_server ${catkin_LIBRARIES})
add_executable(action_client src/action_client.cpp)
add_dependencies(action_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(action_client ${catkin_LIBRARIES})S} ${catkin_EXPORTED_TARGETS})액션 파일 작성
먼저 액션 파일이 위치할 action 폴더를 생성한 뒤, Fibonacci.action 파일을 생성합니다.
# goal
int32 order
---
# result
int32[] sequence
---
# feedback
int32[] sequencegoal, result, feedback은 빌드 이후 각각 ros_tutorials_action namespace에 FibonacciGoal, FibonacciFeedback, FibonacciResult 형태로 존재합니다. 해당 namespace에는 이 세 클래스를 포함하는 FibonacciAction도 존재합니다.
action_server
add_executable(action_server src/action_server.cpp)CMakeLists.txt에서 선언한대로 action_server 노드를 위한 코드 src/action_server.cpp를 작성합니다.
#include "ros/ros.h"
#include "actionlib/server/simple_action_server.h"
#include "ros_tutorials_action/FibonacciAction.h"
class FibonacciAction {
protected:
// 노드 핸들
ros::NodeHandle nh_;
// 액션 서버
actionlib::SimpleActionServer<ros_tutorials_action::FibonacciAction> as_;
// 액션 이름
std::string action_name_;
// 액션 피드백 및 결과
ros_tutorials_action::FibonacciFeedback feedback_;
ros_tutorials_action::FibonacciResult result_;
public:
// 액션 서버 초기화
FibonacciAction(std::string name) :
// 핸들, 액션 이름, 콜백, auto_start
// actionlib document에 따르면 auto_start가 true일때 ros::spin을 사용하지 않아도 된다고 합니다.
// boost::bind는 메소드를 callback으로 넘겨주며,
// 전달되는 첫 번째 값을 callback 함수의 2번째 파라미터로 넘겨줍니다. (첫 번째는 자기자신)
as_(nh_, name, boost::bind(&FibonacciAction::executeCB, this, _1), false),
action_name_(name) {
as_.start();
}
~FibonacciAction() {
}
// goal을 받아 지정된 액션을 수행
void executeCB(const ros_tutorials_action::FibonacciGoalConstPtr &goal) {
ros::Rate r(1); // 1hz
bool isSuccess = true;
// 시퀀스 vector를 초기화합니다.
feedback_.sequence.clear();
feedback_.sequence.push_back(0);
feedback_.sequence.push_back(1);
ROS_INFO("%s: Executing, creating fibonacci sequence of order %i with seeds %i, %i", action_name_.c_str(), goal->order, feedback_.sequence[0], feedback_.sequence[1]);
for (int i=1; i<=goal->order; i++) {
// cancel action
if (as_.isPreemptRequested() || !ros::ok()) {
ROS_INFO("%s: Preempted", action_name_.c_str());
as_.setPreempted();
isSuccess = false;
break;
}
feedback_.sequence.push_back(feedback_.sequence[i] + feedback_.sequence[i-1]);
as_.publishFeedback(feedback_);
r.sleep();
}
if (isSuccess) {
result_.sequence = feedback_.sequence;
ROS_INFO("%s: Succeeded", action_name_.c_str());
as_.setSucceeded(result_);
}
}
};
int main(int argc, char** argv) {
ros::init(argc, argv, "action_server"); // set node name
FibonacciAction fibonacci("ros_tutorial_action"); // set action name
ros::spin();
return 0;
}action_client
add_executable(action_client src/action_client.cpp)CMakeLists.txt에서 선언한대로 action_client를 위한 src/action_client.cpp 코드를 작성합니다.
#include "ros/ros.h"
#include "actionlib/client/simple_action_client.h"
#include "actionlib/client/terminal_state.h"
#include "ros_tutorials_action/FibonacciAction.h"
int main(int argc, char** argv) {
ros::init(argc, argv, "action_client"); // set node name
actionlib::SimpleActionClient<ros_tutorials_action::FibonacciAction> ac("ros_tutorial_action", true); // input exact same action name
ROS_INFO("Waiting for action server to start");
ac.waitForServer();
ROS_INFO("Action server started, sending goal.");
ros_tutorials_action::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
if (finished_before_timeout) {
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action Finished: %s", state.toString().c_str());
}
else {
ROS_INFO("Action did not finish before timeout");
}
return 0;
}action_client 노드를 실행하면 result가 반환될 때까지 (혹은 30초의 timeout이 되기 전까지) 대기하다 result를 출력하고 종료됩니다.
빌드 및 실행
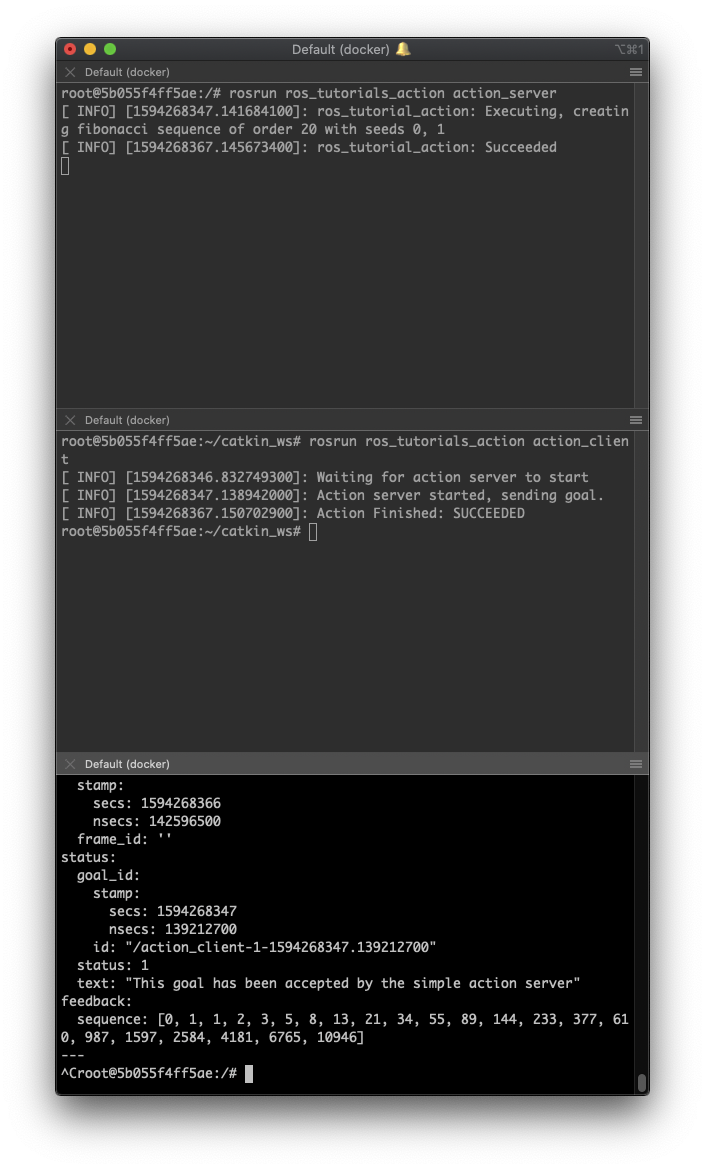
catkin_ws로 돌아와 catkin_make 명령어를 통해 패키지를 빌드합니다. 이후 아래 명령어를 실행하여 server/client를 테스트합니다. rostopic을 사용하여 출력되는 feedback을 확인할 수 있습니다.
# one shell
rosrun ros_tutorials_action action_server
# another shell
rosrun ros_tutorials_action action_client
# other shell
rostopic echo /ros_tutorial_action/feedback아래와 같이 표시되어야 합니다. 위에서부터 서버, 클라이언트, rostopic입니다.
'Robotics' 카테고리의 다른 글
| 9일차 - roslaunch 태그 설명 (0) | 2020.07.09 |
|---|---|
| 9일차 - 파라미터 사용법 (0) | 2020.07.09 |
| 8일차 - ROS Service 프로그래밍 (0) | 2020.07.08 |
| 8일차 - ROS Topic 프로그래밍 (0) | 2020.07.08 |
| 7일차 - ROS2 camera demo (1) | 2020.07.08 |


