반응형
model2.urdf.xacro가 링크와 관절을 포함하도록 다듬어 보겠습니다. 하단 박스를 포함한 <link>는 일부러 터틀봇과 같은 이름을 사용하였고, 상단 실린더는 다른 이름을 사용하였습니다.
<?xml version="1.0" ?>
<robot name="turtlebot3_burger" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot3_description)/urdf/common_properties.xacro"/>
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="light_black"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.2 0.1"/>
</geometry>
</collision>
</link>
<joint name="top_joint" type="fixed">
<parent link="base_link"/>
<child link="top_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<link name="top_link">
<visual>
<origin xyz="0 0 0.5" rpy="0.2 0 0"/>
<geometry>
<cylinder radius="0.08" length="0.3"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.08" length="0.3"/>
</geometry>
</collision>
</link>
</robot>다음 명령어를 실행하여 해당 파일을 robot_description 파라미터로 설정합니다.
# 마스터가 실행되고 있지 않다면
roscore &
# 파라미터 설정
rosparam set /robot_description "$(xacro model2.urdf.xacro)"예제 파일처럼 RViz에서 tf, LaserScan, image 등 나머지 항목을 모두 추가한 모습입니다.
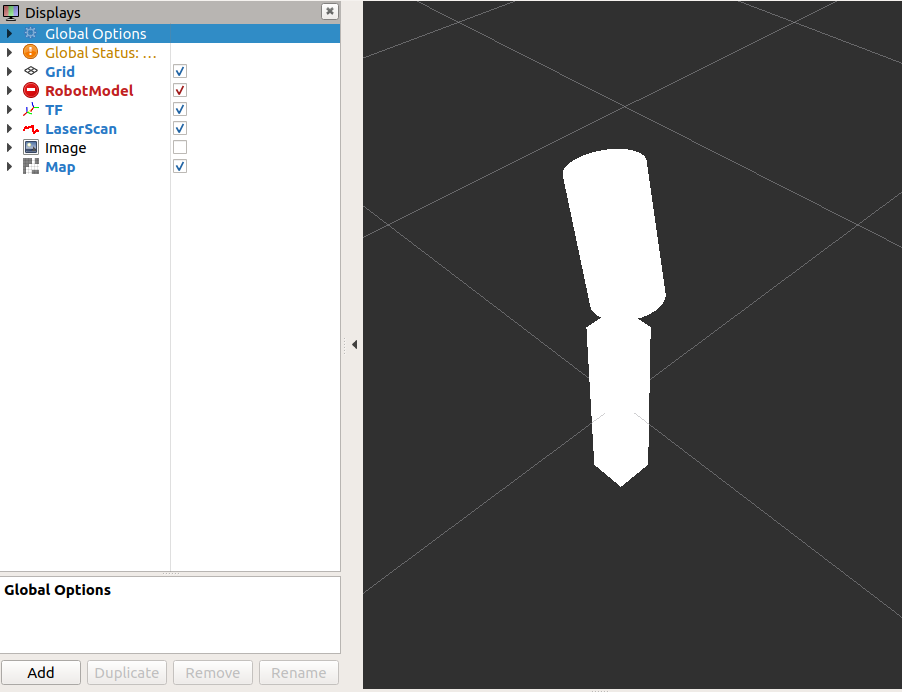
이 상태로는 rosbag을 실행하여도 움직이지 않습니다. RViz 상에서 RobotModel을 움직이기 위해선 tf와의 연결이 필요합니다. SLAM 예제에서 해당 부분은 turtlebot3_remote.launch에서 호출하며, 실제 Pose 정보를 tf로 퍼블리시하는 노드는 robot_state_pulisher입니다.
<!-- turtlebot3_remote.launch -->
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="multi_robot_name" default=""/>
<!-- 로봇 모델을 설정합니다. -->
<include file="$(find turtlebot3_bringup)/launch/includes/description.launch.xml">
<arg name="model" value="$(arg model)" />
</include>
<!-- 각 조인트의 Pose를 TF로 퍼블리시 합니다. -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="50.0" />
<param name="tf_prefix" value="$(arg multi_robot_name)"/>
</node>
</launch>다음과 같이 이동하는 걸 볼 수 있습니다. 물론 저장된 터틀봇의 관절 상태가 움직이는 것이기 때문에 뼈대는 터틀봇과 일치합니다.
rosrun robot_state_publisher robot_state_publisher &
rosbag play -r 10 ~/slam.bag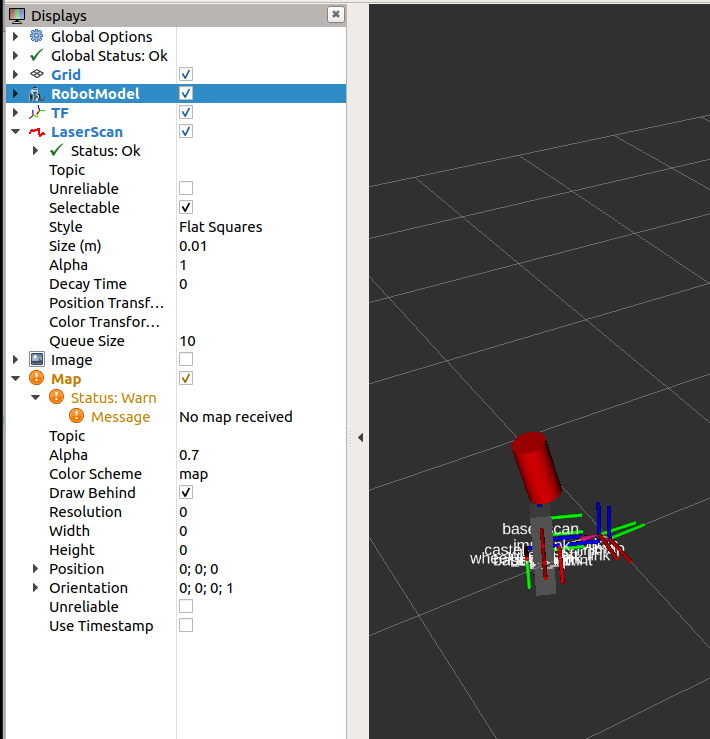
다음 코드를 통해 현재 불러온 모델에 대한 TF 정보를 확인할 수 있습니다.
rosrun rqt_tf_tree rqt_tf_tree &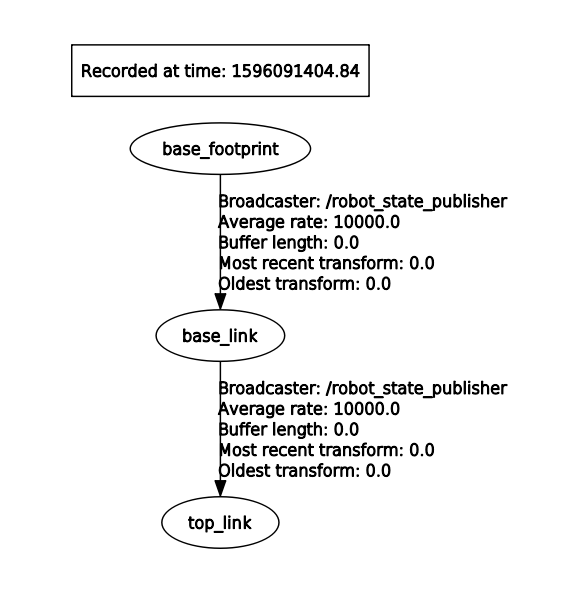
반응형
'Robotics' 카테고리의 다른 글
| 32일차 - /move_base_simple/goal rosnodejs로 퍼블리시 하기 (0) | 2020.08.02 |
|---|---|
| 31일차 - real Navigation (0) | 2020.07.31 |
| 29일차 - RViz 파일 직접 구성하기_1 (xacro, urdf, sdf) (0) | 2020.07.29 |
| 28일차 - real SLAM (0) | 2020.07.29 |
| 27일차 - 터틀봇 네트워크 오류와 export (0) | 2020.07.28 |



