6.3. OpenCR Setup

NOTE: OpenCR에 대해 더 알고 싶다면, OpenCR Wiki를 참고하세요.
6.3.1. OpenCR Firmware Upload for TB3
NOTE: 펌웨어를 업로드하기 위해 두 가지 방법을 사용할 수 있지만, shell script를 사용하는 걸 추천합니다. TurtleBot3의 펌웨어를 수정해야 한다면, 두 번째 방법을 사용할 수 있습니다.
6.3.1.1. (Recommended) 쉘 스크립트
NOTE: 윈도우를 사용하는 개발자라면 아래 아두이노 IDE를 사용하는 방법을 통해 펌웨어를 업로드 하세요.
이 명령어는 Ubuntu 16.04, Ubuntu Mate, Linux Mint, Raspbian (그리고 번역자가 사용한 Ubuntu 20.04)에서 테스트 되었습니다. OpenCR을 remote PC나(데스크톱이나 노트북) 터틀봇 PC(Intel Joule, Raspberry Pi 3)에 연결한 뒤 다음 커맨드를 사용하세요.
터틀봇3 버거
export OPENCR_PORT=/dev/ttyACM0 export OPENCR_MODEL=burger rm -rf ./opencr_update.tar.bz2 # 이전에 사용한 업데이트 파일이 있다면 삭제합니다. wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd .. # 최신 펌웨어를 다운로드하여 업데이트를 진행합니다. ROS2를 사용한다면 git 레포지토리 주소에서 ROS1을 ROS2로 변경합니다.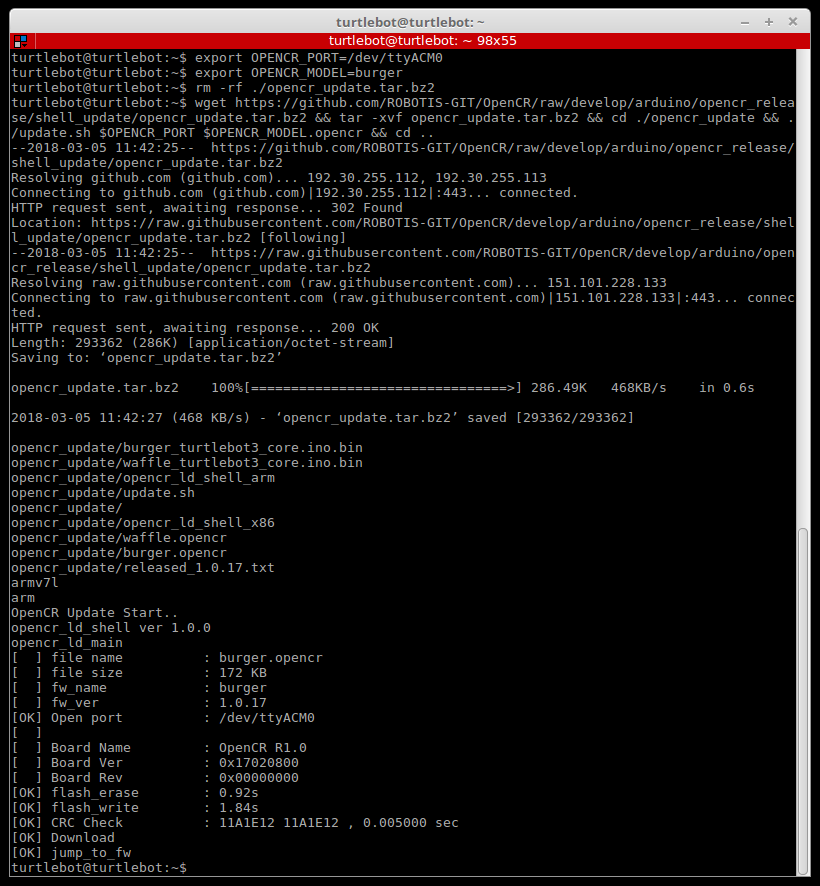
펌웨어 업로드가 끝나면 터미널에서 `jump_to_fw` 텍스트가 출력됩니다.터틀봇3 와플, 와플 파이
export OPENCR_PORT=/dev/ttyACM0 export OPENCR_MODEL=waffle rm -rf ./opencr_update.tar.bz2 wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..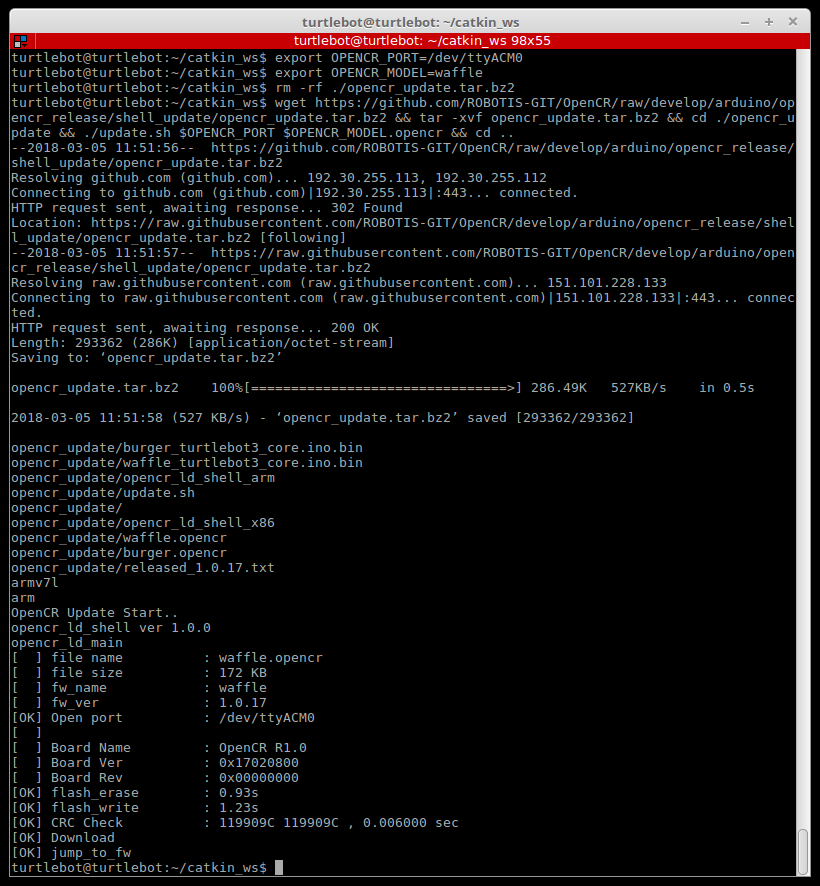
펌웨어 업로드가 끝나면 터미널에서 `jump_to_fw` 텍스트가 출력됩니다.6.3.1.2. (Alternative) Arduino IDE
WARNING: 이 항목은
Remote PC에서 터틀봇3을 제어하는 데스크톱, 노트북 등에서 진행하여야 합니다. 이 명령어를 터틀봇3에 적용하지 마십시오.
이 단계를 시작하기 전에, 아두이노 IDE를 Remote PC에 설치합니다.
터틀봇3의 OpenCR 펌웨어는 다이나믹셀을 제어하거나, 센서 데이터를 전송하는 작업을 합니다. 펌웨어는 보드 매니저가 다운로드한 OpenCR 예제 폴더에 안에 있습니다.
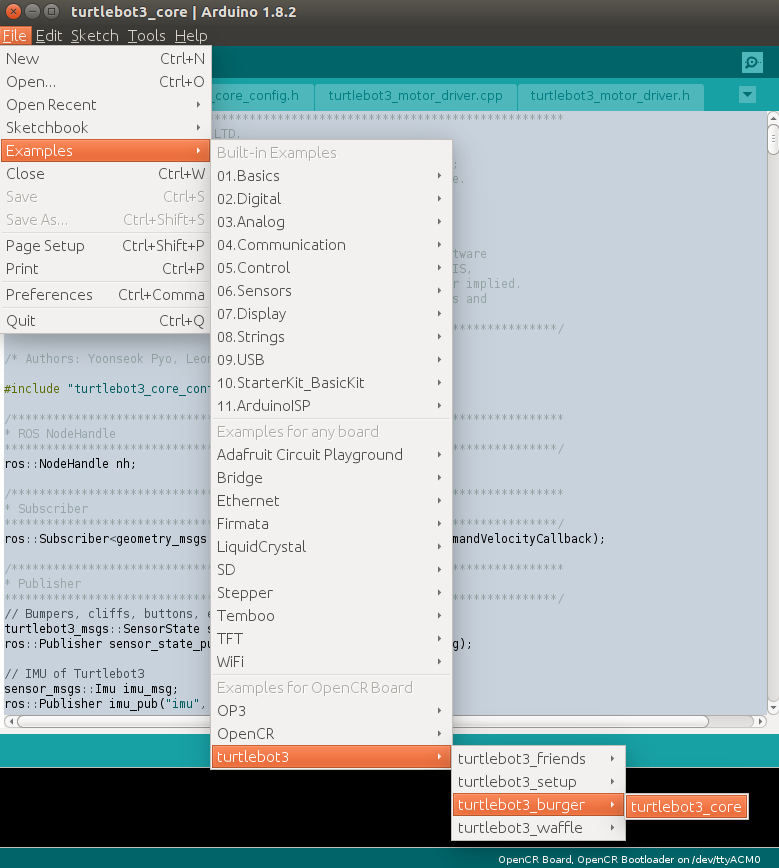
터틀봇3 버거를 가지고 있다면,
[Remote PC] 파일 > 예제 > turtlebot3 > turtlebot3_burger > turtlebot3_core
터틀봇3 와플이나 와플 파이를 가지고 있다면,
[Remote PC] 파일 > 예제 > turtlebot3 > turtlebot3_waffle > turtlebot3_core
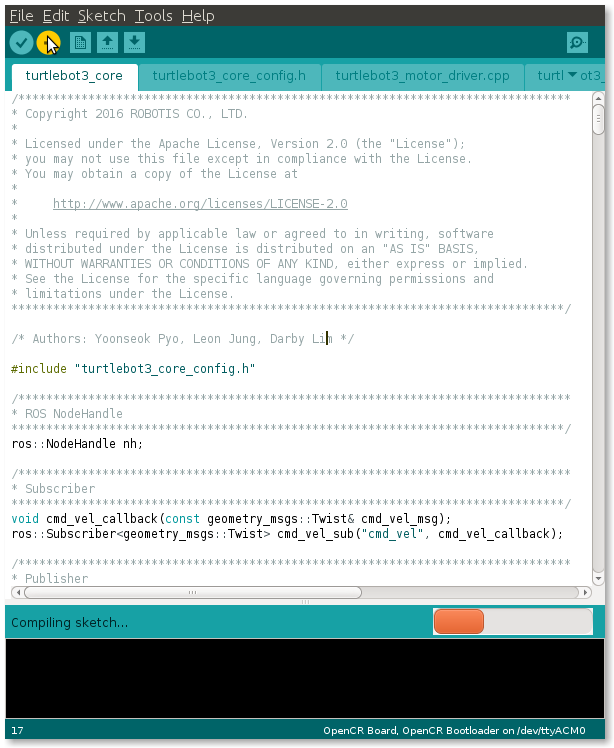
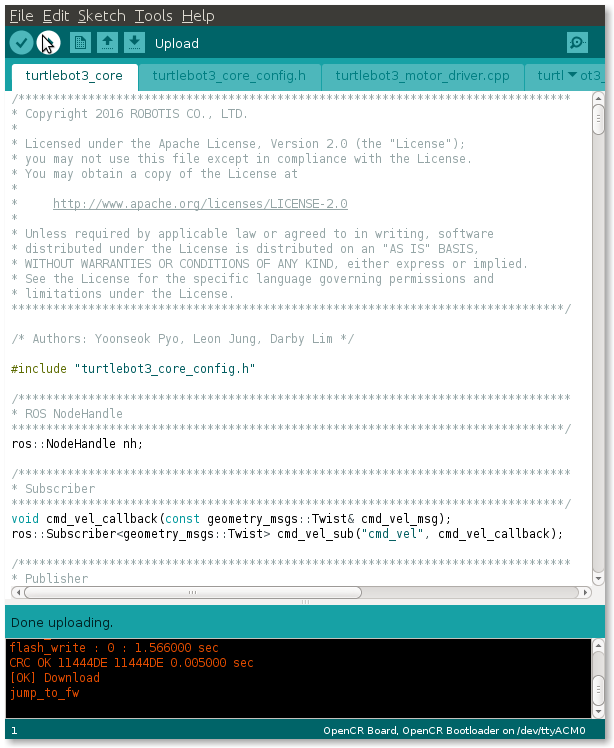
[Remote PC] OpenCR에 펌웨어를 올리려면 Upload 버튼을 클릭하세요.
 )
)
NOTE: 펌웨어를 업로드하는 과정에 에러가 발생한다면 도구 > 포트에서 올바른 포트가 선택되었는지 확인하세요. OpenCR에서
Reset버튼을 누르고 펌웨어를 다시 업로드 합니다.
[Remote PC] 펌웨어가 업로드되면, jump_to_fw 텍스트가 화면에 출력됩니다.
6.3.2. 기본 동작

PUSH SW 1과 PUSH SW 2 버튼을 눌러 로봇이 올바르게 동작하는지 확인할 수 있습니다. 이 과정은 양쪽 다이나믹셀과 OpenCR 보드를 테스트합니다.
- 터틀봇3을 조립하고나서, OpenCR에 배터리를 연결하고 스위치를 켭니다. OpenCR의
Power LED가 켜지는 걸 볼 수 있습니다. - 로봇을 바닥에 두세요. 테스트를 위해 1미터의 안전 거리를 두는 걸 추천합니다.
PUSH SW 1를 몇 초간 꾹 누르고 있으세요. 로봇이 30cm 앞으로 움직입니다.PUSH SW 2를 몇 초간 꾹 누르고 있으세요. 로봇이 180도 회전합니다.
'Robotics' 카테고리의 다른 글
| 22일차 - Turtlebot3 Bringup 코드 분석 (1) | 2020.07.22 |
|---|---|
| 21일차 - Turtlebot3 bringup (0) | 2020.07.22 |
| 20일차 - ROS Noetic 마이그레이션 가이드 (0) | 2020.07.21 |
| 19일차 - how rosrun works (0) | 2020.07.20 |
| 19일차 - ROS Lunar 마이그레이션 가이드 (0) | 2020.07.19 |
