서론
위 강의는 네이버 카페 오로카에 게시된 표윤석님의 ROS 2 강의를 이해하면서, 제 식대로 재구성한 게시글입니다.
서비스: https://cafe.naver.com/openrt/24128
액션: https://cafe.naver.com/openrt/24142
추후 강의로는
- SI 단위 작성
- 좌표계 맞추기
- 코딩 스타일 가이드
- ament_lint와 같은 lint 계열
- 토픽, 서비스, 액션 파라미터에 대한 기본적인 프로그램
- rqt gui 작성
같은 강의가 이루어질 예정입니다. 오픈채팅 방에 참가하시고, 매주 화요일 7시 반에 ROS 2 강의에 참석하세요!!
- 오로카: https://cafe.naver.com/openrt
- 오로카 ROS 유저모임 오픈채팅 방: https://open.kakao.com/o/gAeOb2nc
서비스
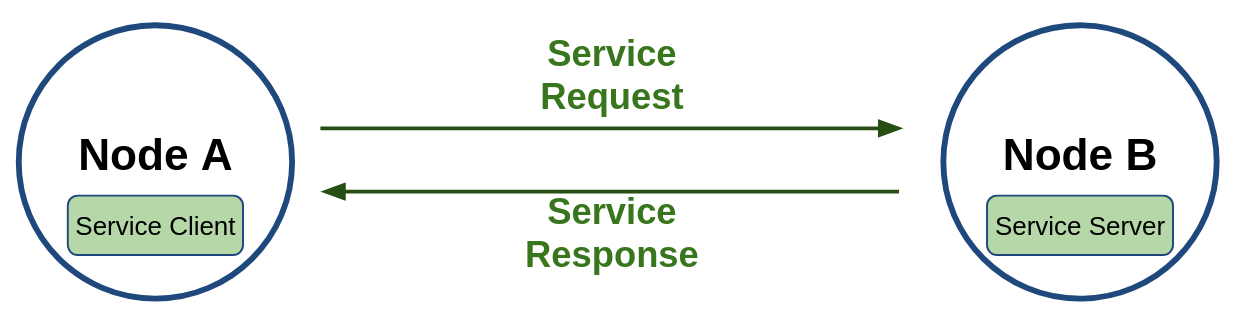
서비스는 동기식 양방향 메시지 송수신 방식이라고 말씀 드렸었죠. 그림과 같이 서비스를 요청하는 쪽은 서비스 클라이언트, 서비스 수행 이후 응답하는 쪽은 서비스 서버라고 불립니다. 서비스 요청 및 응답에 사용되는 ros 인터페이스를 srv 인터페이스라고 합니다.
토픽과 비교했을 때 토픽은 센서라던지, 로봇의 속도 전달, 좌표 전달에 사용되며,
로봇의 특정 관절 각도 요청 -> 단답형 응답 등의 데이터는 서비스를 이용하게 됩니다. 토픽에 비해 사용 빈도는 적지만 여전히 중요합니다.
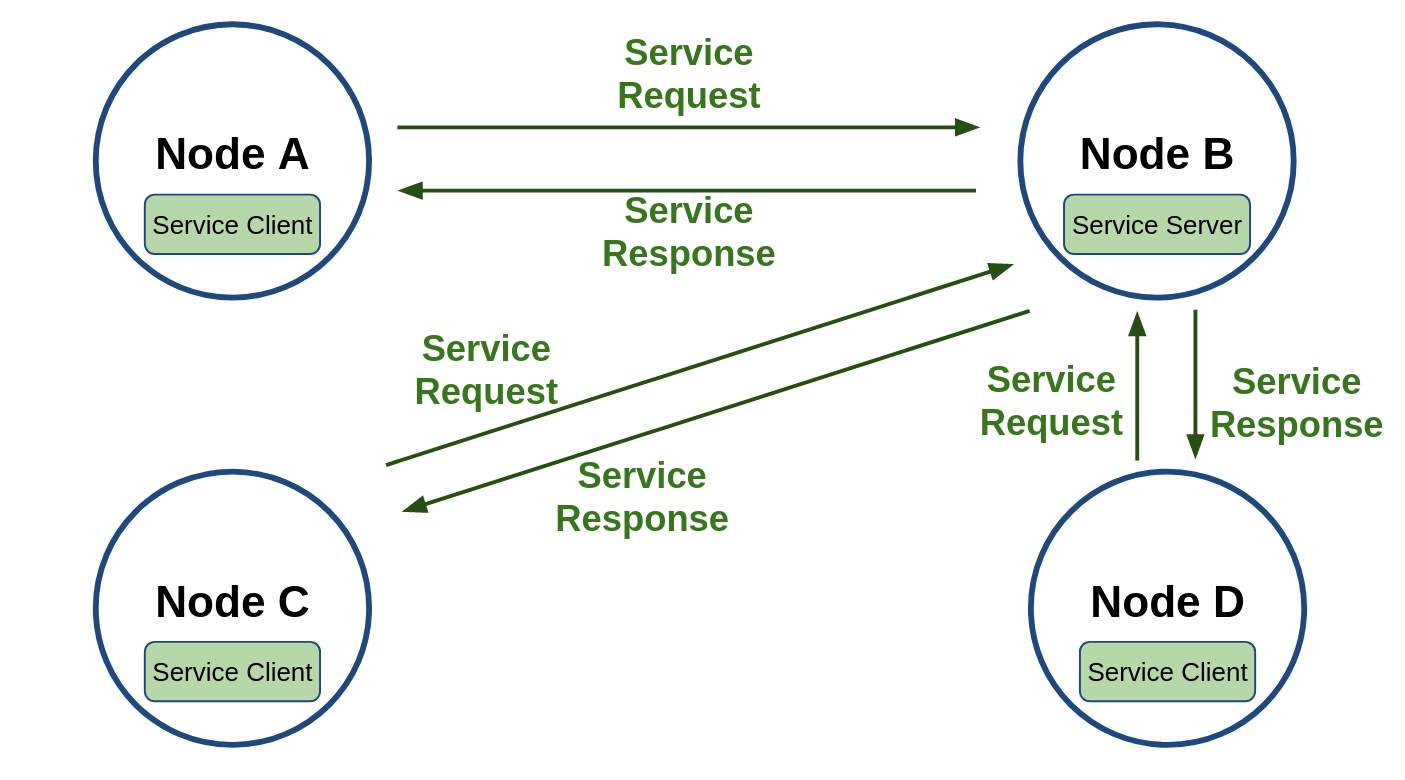
서비스는 하나의 서비스 서버가 여러 개의 클라이언트를 가질 수 있습니다. 단, 서비스 응답은 서비스를 요청한 클라이언트에게만 전달됩니다. 1대N이라기 보단, 1대1이 여러 개 있다고 이해하시면 될 것 같습니다.
서비스 목록 확인
서비스 목록 확인을 위해 예제 노드를 실행합니다.
ros2 run turtlesim turtlesim_node다음 명령어를 통해 현재 실행 중인 서비스 목록을 확인할 수 있습니다.
ros2 service list
/clear
/kill
/reset
/spawn
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/describe_parameters
/turtlesim/get_parameter_types
/turtlesim/get_parameters
/turtlesim/list_parameters
/turtlesim/set_parameters
/turtlesim/set_parameters_atomically이름에 parameters가 들어간 서비스는 파라미터와 관련된 내용으로, 모든 노드에 기본으로 포함되는 서비스라고 합니다. 이에 대한 부분은 파라미터에서 다루겠습니다.
/clear
/kill
/reset
/spawn
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative서비스 형태 확인
특정 서비스의 형태를 확인해봅시다.
ros2 service type /clear
std_srvs/srv/Emptyros2 service type /kill
turtlesim/srv/Killros2 service type /spawn
turtlesim/srv/Spawn이전에 사용하였던 ros2 service list 명령어에 -t 옵션을 붙이면 서비스 목록과 함께 각각의 서비스의 형태를 확인할 수 있습니다.
ros2 service list -t
/clear [std_srvs/srv/Empty]
/kill [turtlesim/srv/Kill]
/reset [std_srvs/srv/Empty]
/spawn [turtlesim/srv/Spawn]
/turtle1/set_pen [turtlesim/srv/SetPen]
/turtle1/teleport_absolute [turtlesim/srv/TeleportAbsolute]
/turtle1/teleport_relative [turtlesim/srv/TeleportRelative]서비스 요청
이전에 토픽을 보내고 받을 때 ros2 topic 명령어를 사용한 것처럼, 이번에는 CLI 환경에서 서비스를 요청해봅시다.
ros2 service call <service_name> <service_type> "<arguments>"해당 명령어는 위와 같이 사용하며, 활용을 위해 터틀심의 이동 궤적을 지워봅시다. 이를 위해 먼저 터틀심 이동 노드를 실행합니다.
ros2 run turtlesim turtle_teleop_key
/clear 서비스를 요청하여 이동 궤적을 삭제할 수 있습니다. /clear 서비스는 아까 확인한 것처럼 std_srvs/srv/Empty 형태이기 때문에 "<arguments>"를 생략할 수 있습니다.
ros2 service call /clear std_srvs/srv/Empty
waiting for service to become available...
requester: making request: std_srvs.srv.Empty_Request()
response:
std_srvs.srv.Empty_Response()
/kill을 통해 거북이를 삭제할 수 있습니다ㅠㅠ 삭제를 위해서는 거북이의 이름을 "<arguments>" 형태로 입력하여야 합니다.
ros2 service call /kill turtlesim/srv/Kill "name: 'turtle1'"
waiting for service to become available...
requester: making request: turtlesim.srv.Kill_Request(name='turtle1')
response:
turtlesim.srv.Kill_Response()
/reset 서비스로 거북이가 다시 돌아옵니다ㅎㅎ 궤적과 위치, 포즈는 모두 재설정됩니다.
ros2 service call /reset std_srvs/srv/Empty
requester: making request: std_srvs.srv.Empty_Request()
response:
std_srvs.srv.Empty_Response()
/set_pen 서비스는 궤적의 색과 크기를 변경할 수 있습니다. 궤적의 색은 r, g, b로 결정되며, 굵기는 width로 지정합니다.
ros2 service call /turtle1/set_pen turtlesim/srv/SetPen "{r: 255, g: 255, b: 255, width: 10}"
requester: making request: turtlesim.srv.SetPen_Request(r=255, g=255, b=255, width=10, off=0)
response:
turtlesim.srv.SetPen_Response()
/spawn 서비스를 요청하면 지정한 위치 및 자세로 지정한 이름의 거북이를 추가할 수 있습니다. 이름을 옵션으로 지정하지 않으면 turtle2, 3, 4, ... 하나씩 증가하며, 같은 이름은 사용할 수 없습니다.
$ ros2 service call /kill turtlesim/srv/Kill "name: 'turtle1'"
requester: making request: turtlesim.srv.Kill_Request(name='turtle1')
response:
turtlesim.srv.Kill_Response()
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 5.5, y: 9, theta: 1.57, name: 'leonardo'}"
requester: making request: turtlesim.srv.Spawn_Request(x=5.5, y=9.0, theta=1.57, name='leonardo')
response:
turtlesim.srv.Spawn_Response(name='leonardo')
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 5.5, y: 7, theta: 1.57, name: 'raffaello'}"
requester: making request: turtlesim.srv.Spawn_Request(x=5.5, y=7.0, theta=1.57, name='raffaello')
response:
turtlesim.srv.Spawn_Response(name='raffaello')
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 5.5, y: 5, theta: 1.57, name: 'michelangelo'}"
requester: making request: turtlesim.srv.Spawn_Request(x=5.5, y=5.0, theta=1.57, name='michelangelo')
response:
turtlesim.srv.Spawn_Response(name='michelangelo')
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 5.5, y: 3, theta: 1.57, name: 'donatello'}"
requester: making request: turtlesim.srv.Spawn_Request(x=5.5, y=3.0, theta=1.57, name='donatello')
response:
turtlesim.srv.Spawn_Response(name='donatello')
$ ros2 topic list
/donatello/cmd_vel
/donatello/color_sensor
/donatello/pose
/leonardo/cmd_vel
/leonardo/color_sensor
/leonardo/pose
/michelangelo/cmd_vel
/michelangelo/color_sensor
/michelangelo/pose
/new_turtle/cmd_vel
/new_turtle/pose
/parameter_events
/raffaello/cmd_vel
/raffaello/color_sensor
/raffaello/pose
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
/turtle2/cmd_vel
/turtle2/pose
/turtle3/cmd_vel
/turtle3/color_sensor
/turtle4/cmd_vel
/turtle4/color_sensor
/turtle4/pose서비스 인터페이스
/spawn 서비스의 인터페이스는 어떻게 생겼을까요? /spawn의 서비스 타입은 turtlesim/srv/Spawn.srv입니다. ros2 interface show 명령어로 해당 타입의 형태를 확인해봅시다.
$ ros2 interface show turtlesim/srv/Spawn.srv
float32 x
float32 y
float32 theta
string name
---
string name아까 거북이를 생성할 때 표시되었던 내용과 동일합니다. 이름, x, y, theta를 입력하고, 이름을 반환했습니다.
requester: making request: turtlesim.srv.Spawn_Request(x=5.5, y=7.0, theta=1.57, name='raffaello')
response:
turtlesim.srv.Spawn_Response(name='raffaello')'Robotics' 카테고리의 다른 글
| 64일차 - 도로 이미지에서 차선 정보 검출하기 (0) | 2020.09.03 |
|---|---|
| 63일차 - ROS 2 액션 알아보기 [오로카 ROS 유저모임] (0) | 2020.09.01 |
| 62일차 - 차원과 단위 예제 풀이 [쉽게 배우는 기계공학 개론] (0) | 2020.09.01 |
| 61일차 - 차원과 단위, SI 단위계, 위치 에너지, 운동 에너지, 역학적 에너지 [쉽게 배우는 기계공학 개론] (0) | 2020.08.30 |
| 60일차 - C++ openCV 4 실시간 영상에서 ORB 특징점 추출 및 FLANN 매칭하기 (0) | 2020.08.30 |

