zumi 와이파이 사용하지 않고 접속
주미를 켠 다음, 노트북에서 zumi0000 와이파이를 잡고 zumidashboard.ai에 접속합니다. 주미가 무선 인터넷에 연결이 되면, 터미널에서 ifconfig 등을 이용하여 주미의 아이피를 확인합니다.
pi@zumi3766:~/Dashboard $ ifconfig wlan0wlan0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.0.34 netmask 255.255.255.0 broadcast 192.168.0.255
inet6 fe80::ba27:ebff:fea0:6e57 prefixlen 64 scopeid 0x20<link>
ether b8:27:eb:a0:6e:57 txqueuelen 1000 (Ethernet)
RX packets 19932 bytes 2167568 (2.0 MiB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 33190 bytes 34118562 (32.5 MiB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0노트북에서 주미가 접속한 와이파이와 같은 AP에 접속하여 확인한 inet으로 접속합니다.

주미 터미널 접속
이전에 주미 대시보드에 접속하여 무선랜을 연결한 적이 있다면 주미는 부팅 시 알아서 와이파이를 잡습니다. 주미 AP에 접속하지 않아도, (2G, 5G 상관 없이) 주미와 같은 와이파이를 사용 중이라면 와이파이 내에서 주미의 아이피를 확인한 후, 해당 아이피로 ssh를 시도할 수 있습니다.
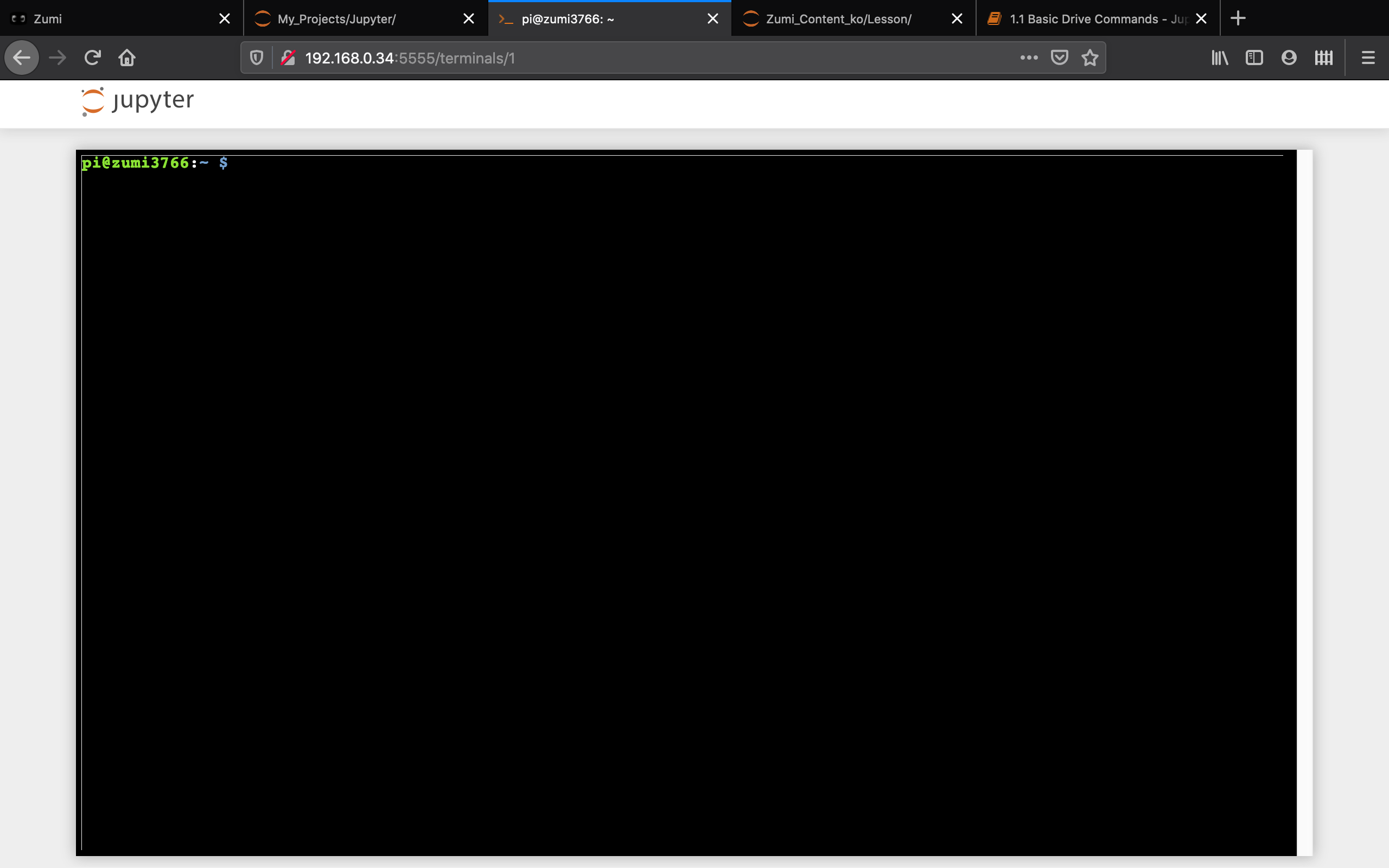
ssh pi@192.168.0.34혹은 주미의 jupyter에서 터미널을 열 수 있습니다. http://192.168.0.34:5555/terminals/1에 접속하면 웹셸 형태의 터미널이 보입니다.
주미 충전 중 사용
위 사항들을 응용하면 주미를 충전하면서도 일부 사용할 수 있습니다. 주미의 본체를 이루는 라즈베리파이는, 전원이 연결되면 별도의 부팅 과정 없이도 스스로 실행되기 때문입니다. 다만, 충전 중에는 (케이블을 인식하여) 대시보드가 실행되지 않습니다. 반대로 주미 대시보드를 먼저 실행한 후, 충전기에 연결하고 전원을 끄면 주미를 그대로 사용할 수 있습니다. 물론 주행 중 선꼬임을 방지하기 위해 뒤집어 놓고 사용하고 있습니다.
zumi.forward()
zumi.forward() 명령어를 사용하여 직진하고, zumi.reverse() 명령어를 사용하여 후진할 수 있습니다.
from zumi.zumi import Zumi
zumi = Zumi()
zumi.forward()zumi.forward()는 어떤 코드로 이루어져 있을까요? 아마도 아두이노에 I2C로 값을 전달하여 두 DC 모터를 움직이고 있을 겁니다. 확인해보도록 할까요?
init()
# zumi.py
# ...
class Zumi:
def __init__(self):
# ...
# drive PID values; used in forward(),go_straight() etc
self.D_P = 2.9
self.D_I = 0.01
self.D_D = 0.05
# turn PID values; used in turn()
self.T_P = 0.6
self.T_I = 0.001
self.T_D = 0.001
# ...먼저 주미 클래스는 이것저것 초깃값을 설정하고 있습니다. 그 중 zumi.forward()에 사용되는 값은 위와 같습니다. PID 값은 무엇일까요? PID는 PID 제어에 사용되는 파라미터입니다. PID 제어(비례-적분-미분 제어기, Proportional-Integral-Differential controller)는 출력값과 설정값을 비교하여 오차를 계산한 뒤, 오차의 P배, 오차를 적분한 값의 I배, 오차를 미분한 값의 D배를 하는 구조로, PID의 각 값이 달라지면 그래프는 다음과 같이 변화합니다.

오차를 e(t)로 나타내고, PID를 각각 K_p, K_i, K_d로 나타낸 공식은 다음과 같습니다.

세 가지 항이 가지는 의미는 다음과 같습니다.
- 비례항: 현재 상태에서 오차값의 크기에 비례한 제어 작용을 합니다.
- 적분항: 정상 상태(steady-state)에서 오차를 없애는 작용을 합니다.
- 미분항: 출력값의 급격한 변화에 제동을 걸어 오버슛을 줄이고 안정성을 향상시키는 작용을 합니다.
이를 알고 다시 한 번 그래프를 봅시다. P가 증가할수록 그래프의 전체적인 높이가 커지고, I가 증가하면 굴곡이 심해지고, D가 증가하면 그래프가 다시 평평해집니다.
출력값은 제어에 필요한 제어값이라고 하는데, 우리의 경우에는 속도를 얼마나 증가/감속할지 결정하므로 가속도를 나타내겠지요? PID 값들은 실험적/경험적 방법을 통해 계산한다고 합니다. (계산 방법으로는 지글러-니콜스 방법 등이 있습니다.) PID에 대해서는 이렇게 대략적으로만 알아보고 zumi.forward() 함수를 알아보도록 할까요?
forward()
# ...
def forward(self, speed=40, duration=1.0, desired_angle=123456, accuracy=1.0):
'''
#:param speed: the forward speed you want Zumi to drive at. Should only input a positive number
#:param duration: number of seconds you want Zumi to try to drive forward
#:param desired_angle: the desired angle
#:return: nothing
'''
k_p = self.D_P
k_i = self.D_I
k_d = self.D_D
if (desired_angle == 123456):
# if no input find the z angle and go in that direction
desired_Angle = self.read_z_angle()
max_speed = 127
self.reset_PID()
start_time = time.time()
speed_now = 0
accel_period = 0.7
# acceleration to start motors
# -------------------------------------
if duration >= accel_period:
while time.time() - start_time < aceel_period:
if (speed_now < max_speed):
speed_now = speed_now + 1
self.drive_at_angle(60, abs(speed_now), desired_angle, k_p, k_d, k_i, accuracy)
elif duration < accel_period:
while time.time() - start_time < abs(duration * 0.6):
if (speed_now < max_speed):
speed_now = speed_now + 1
self.drive_at_angle(60, abs(speed_now), desired_angle, k_p, k_d, k_i, accuracy)
# -------------------------------------
# stay with constant max speed
while (time.time() - start_time) < abs(duration):
self.drive_at_angle(max_speed, abs(speed), desired_angle, k_p, k_d, k_i, accuracy)
self.stop()모르는 내용이 참 많네요^^; 자체적인 함수는 나중에 알아보기로 하고 로직부터 설명해볼까요? 먼저 주행을 위한 PID 값을 받아옵니다. desired_angle이 초깃값이면 현재 향하고 있는 방향을 읽어오고, 아니라면 해당 방향으로 향하는 듯 합니다. 최대 속도는 127이며 초기 속도는 0입니다. 현재 시간부터 accel_period까지 속도를 하나씩 올려가며 가속을 하며, 이후에는 속도를 유지하며 달립니다. duration 동안 주행한 이후에는 멈춰섭니다. duration이 accel_period보다 작은 경우에는 duration의 0.6배만큼 가속하고 이후 해당 속도로 주행합니다.
etc.
각각의 함수들을 살펴보면 다음과 같습니다. zumi.read_z_angle() 함수는 자이로 센서에서 Z 값을 읽어옵니다.
def read_z_angle(self):
"""
updates and reads the angle from the gyroscope
and returns only the z angle
:return: z axis angle
"""
# updates and reads only the Z angle
angle_list = self.update_angles()
return angle_list[2]zumi.reset_PID()는 적분 에러와 누적 에러를 초기화하고 PID와 gyro 시간을 초기화합니다.
def reset_PID(self):
"""
The error values for error integral and error past
will need to be reset every time the
PID needs to be used for driving straight or turning
"""
self.PID_time_past = time.time()
self.gyro_time_past = time.time() $ for the angle readings
self.error_sum = 0
self.error_past = 0zumi.drive_at_angle(...)
대망의 zumi.drive_at_angle(...)은 과연 어떤 모양일까요?
def drive_at_angle(self, max_speed, base_speed, desired_angle, k_p, k_d, k_i, min_error):
"""
#Use this method if you wish to drive Zumi in a straight line or turn.
#:param max_speed: This number will cap the max speed for the motors.
#:param base_speed: This is the "forward/reverse" speed Zumi will drive at.
# set to 0 if you wish not to move forward or reverse.
#:param desired_angle: This will be the angle Zumi will try to drive towards. Can be a positive or negative number
#:param k_p: constant for proportional controller.
#:param k_d: constant for derivative controller.
#:param k_i: constant for integral controller.
#:param min_error: the minimum error that the motors will stop trying to correct for
#:return: error
"""
# update the angles and grab the Z angle
angles_now_list = self.update_angles()
angle_z = angles_now_list[2]
# calculate error values
error = desired_angle - angle_z
self.error_sum = self.error_sum + error
error_change = error - self.error_past
self.error_past = error
# find change in time
dt = time.time() - self.PID_time_past
self.PID_time_past = time.time()
# PID components
e_p = (k_p * error)
e_d = (k_d * error_change / dt)
e_i = (k_i * self.error_sum * dt)
speed_offset = int(e_p + e_d + e_i)
# if within the error threshold set motors to 0 speed
if abs(error) < min_error:
speed_offset = 0
# input speed for all functions that use drive_at_angle are capped at +-MAX_USER_SPEED=80
base_speed = self.clamp(int(base_speed), -1 * self.MAX_USER_SPEED, self.MAX_USER_SPEED)
# make sure motor speeds never go above 127 or below -127
final_left_speed = self.clamp(base_speed - speed_offset, -max_speed, max_speed)
final_right_speed = self.clamp(base_speed + speed_offset, -max_speed, max_speed)
# send I2C msg to set motors to these values, with no acceleration
self.control_motors(final_right_speed, final_left_speed)
return error자이로 센서에서 Z 값을 받아와 desired_angle과의 에러를 측정합니다. 또한, PID 제어 파트가 다시 나왔네요. 미분은 단위 시간 당 에러의 변화량으로, 적분은 누적 에러 * 단위 시간으로 해결할 수 있었습니다.
zumi.forward()에선 min_error로 항상 accuracy를 넣어주는데, zumi.drive_at_angle()에서는 에러가 accuracy보다 작을 경우 가속도를 0으로 만들어버립니다.
base_speed와 final_left_speed, final_right_speed를 일정 범위 안에 매핑하기 위해 clamp 함수를 사용합니다. 이후 조정된 값을 I2C 메시지로 아두이노에 전달합니다.
def control_motors(self, right, left, acceleration=0):
right = self.clamp(right, -126, 127)
left = self.clamp(left, -126, 127)
right = _convert_to_arduino_speed(right)
left = _convert_to_arduino_speed(left)
try:
self.bus.write_i2c_block_data(Device.Arduino, _create_command(CommandType.Motor, MotorCommand.SetMotorstoSpeed, acceleration), [right, left])
time.sleep(self.MIN_I2C_DELAY)
except IOError:
time.sleep(self.MIN_I2C_DELAY)
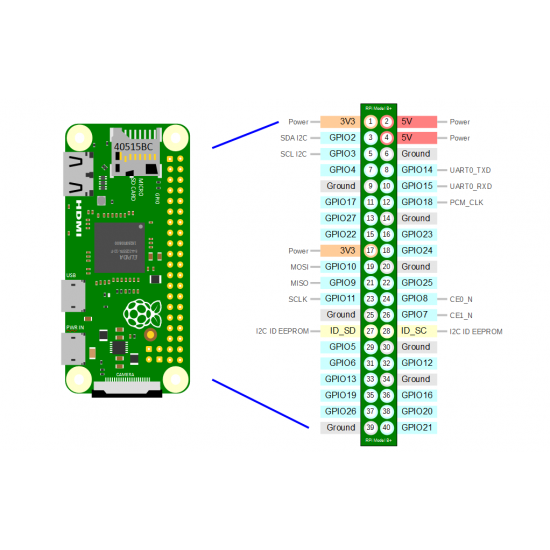
self.stop()I2C 통신은 데이터를 주고 받는 선(SDA, Serial DAta)과 송수신 타이밍 동기화를 위한 선(SCL, Serial CLock) 하나로 이루어져 있습니다. 하나의 마스터에 최대 127개의 슬레이브로 구성될 수 있으며, 주미의 경우 라즈베리파이 제로가 마스터이며 아두이노가 슬레이브가 되는 형식입니다. 라즈베리파이 제로의 3번, 5번 핀이 각각 SDA, SCL이며, 이는 아두이노에 연결이 되어 있네요.
Reference
'Robotics' 카테고리의 다른 글
| 71일차 - 주미 주행 모드 코드 분석하기 (flask, react, socketio) (1) | 2020.09.18 |
|---|---|
| 70일차 - 주미 자율주행 자료조사 (0) | 2020.09.16 |
| 68일차 - 정역학, 힘의 성질 [쉽게 배우는 기계공학 개론] (0) | 2020.09.07 |
| 67일차 - Motion Planning (0) | 2020.09.06 |
| 66일차 - Zumi 회전 코드, 지도 제작 (0) | 2020.09.05 |


